每日必修——‘continuum robot’ 兩篇
Dynamic Task Space Control Enables Soft Manipulators to Perform Real-World Tasks
時(shí)間: 2022
期刊:?Advanced Intelligent Systems(7.298/JCRQ1/——)
摘要
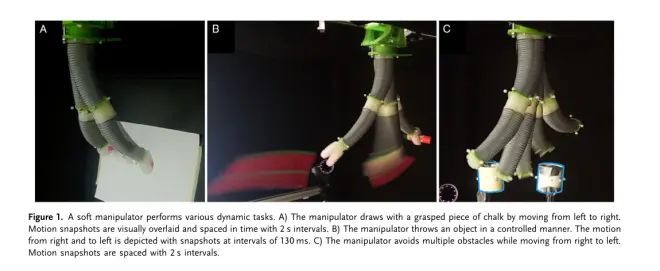
Dynamic motions are a key feature of robotic arms, enabling them to perform tasks quickly and efficiently.?
A majority of real-world soft robots rely on a quasistatic control approach, without taking dynamic characteristics into consideration.?
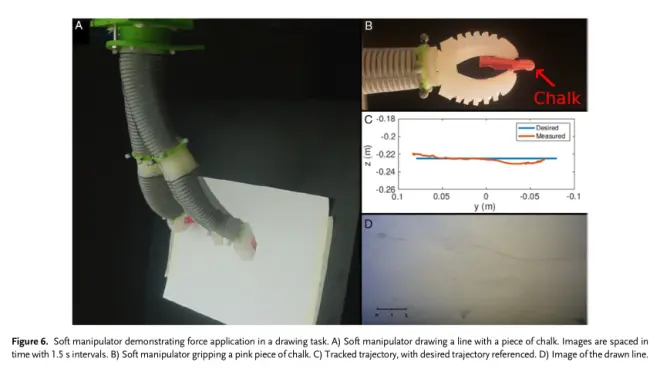
As a result, robots with this restriction move slowly and are not able to adequately deal with forces, such as handling unexpected perturbations or manipulating objects.?
A dynamic approach to control and modeling would allow soft robots to move faster and handle external forces more efficiently.?
In previous studies, different aspects of modeling, dynamic control, and physical implementation have been examined separately, while their combination has yet to be thoroughly investigated.?
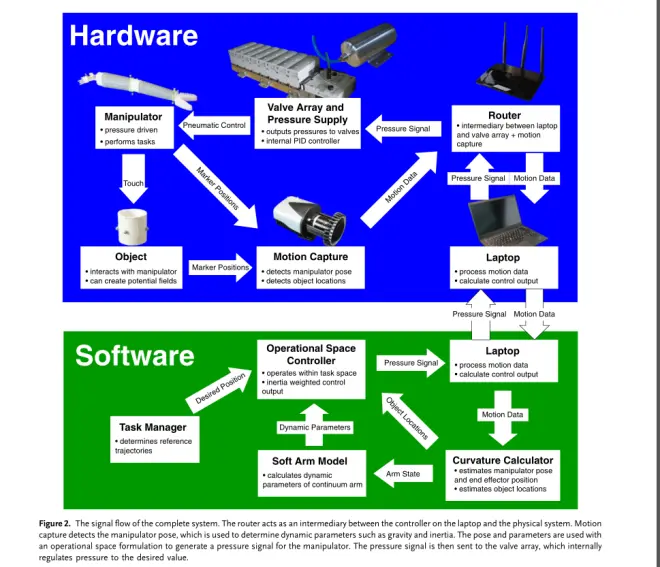
Herein, the accuracy of the dynamic model of the multisegment continuum robot is improved by adding new elements that include variable stiffness and actuation behavior.?
Then, this improved model is integrated with state-of-the-art system identification and dynamic task space control and experiments are performed to validate this combination on a real-world manipulator.
As a means of encouraging future research on dynamic control for soft robotic manipulators, the source code is made available for modeling, control, and system identification, along with the recipes for fabricating the manipulator.
重要圖片

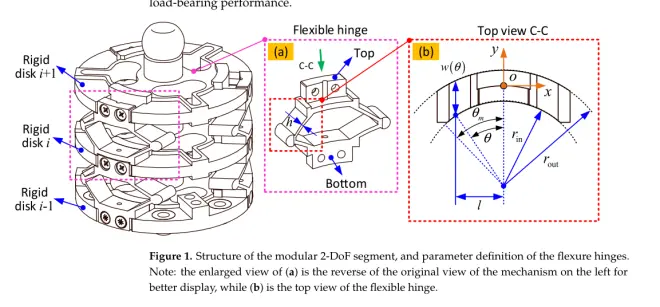
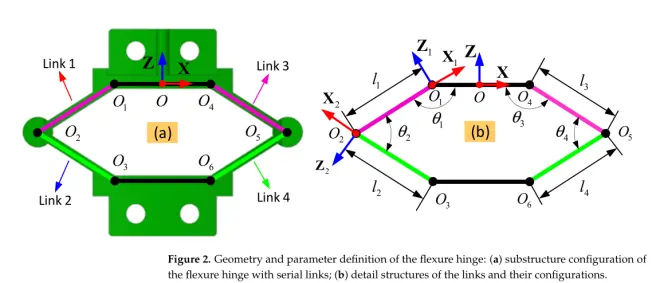
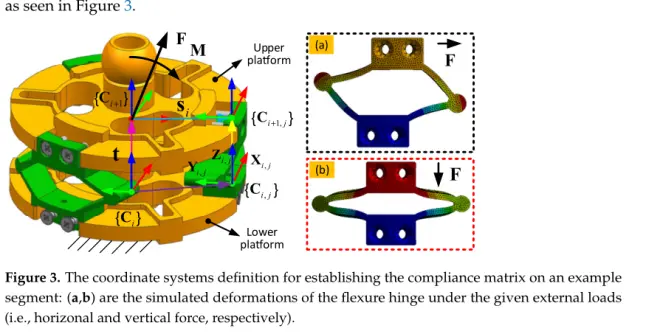
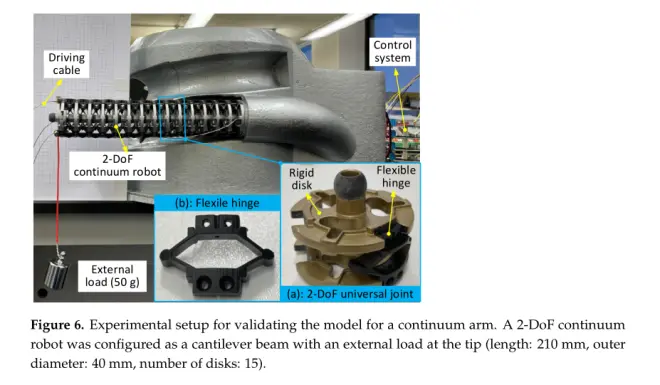
Modelling and Analysis of the Spital Branched Flexure-Hinge Adjustable-Stiffness Continuum Robot
時(shí)間:?2022
期刊:?Robotics MDPI (4.9/-/-)
摘要
Continuum robots are increasingly being used in industrial and medical applications due to their high number of degrees of freedom (DoF), large workspace and their ability to operate dexterously . However, the positional accuracy of conventional continuum robots with a backbone structure is usually low due to the low stiffness of the often-lengthy driving cables/tendons. Here, this problem has been solved by integrating additional mechanisms with adjustable stiffness within the continuum robot to improve its stiffness and mechanical performance, thus enabling it to be operated with high accuracy and large payloads. To support the prediction of the improved performance of the adjustable stiffness continuum robot, a kinetostatic model was developed by considering the generalized internal loads that are caused by the deformation of the flexure-hinge mechanism and the structural stiffening caused by the external loads on the end-effector. Finally , experiments were conducted on physical prototypes of 2-DoF and 6-DoF continuum robots to validate the model. It was found that the proposed kinetostatic model validates experimental observations within an average deviation of 9.1% and 6.2% for the 2-DoF and 6-DoF continuum robots, respectively . It was also found that the kinematic accuracy of the continuum robots can be improved by a factor of 32.8 by adding the adjustable stiffness mechanisms.
重要圖片